《LoRaWAN 定位白皮书》中文解读!定位能力、案例部署全解析
- 架构
- 传播误差的影响
- 部署策略的影响
- 时间误差的影响
- 滤波提高定位精度
- 巴塞罗那港口
- 伊西莱穆利诺/布伦
- 纳沙泰尔
- 姆科马齐国家公园
- 布依格建筑
- 巴黎
- 托里涅富伊拉尔
• LoRaWAN支持长电池寿命应用的案例;
• TDOA:视情况而定的定位精确度为20-200m;
• RSSI: 1000-2000m的定位精确度;
•精确度随着热点密度的增加而提高
•室内定位方案
• 最精确但最耗电的方案
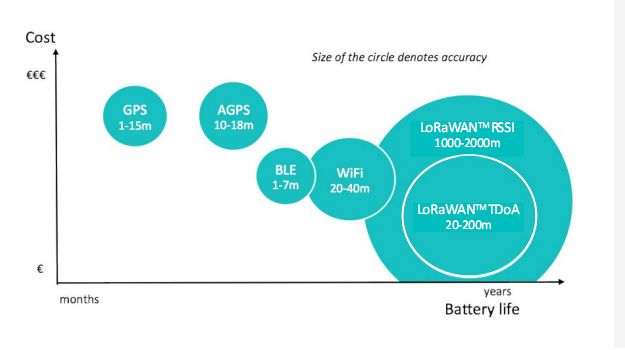
(图3.1 定位技术的比较)
如上图所示,LoRaWAN协议提供了两种定位方法:基于接收信号强度指示(RSSI)的定位,用于粗定位;到达时间差(TDOA)定位,用于精准定位。本文将讨论TDOA定位,因为这种方案更适用于需要低功耗、电池供电设备的场景,定位精度范围是20-200米。
具有清晰的视距和推荐网关部署策略的郊区部署将在低部署规模情况下获得高的精确度。城市和密集的城市环境中多路径问题将会影响定位精度。所以一般来说,随着网关网络密度的增加定位精度也会提高。
一般来说,不需要频繁定位的终端能够获得最佳的电源效率。这些设备通常被设定为固定或者不经常移动的Class A终端。
这些终端的定位信息不需要增加额外的硬件成本。移动的终端需要更频繁的位置信息,它们会传输更多的数据帧、会消耗更多的电量、会增加硬件成本(如电池),这些终端通常会被设定为Class B 或者 Class C。使用更高的数据速率(例如SF7)有助于限制增加的电量需求。
本文的重点是室外、广域的定位。需要注意的是,LoRaWAN圈内正在使用各种方案提供了室内精度10米甚至更好地定位精度(网关密度100米,改进的时钟源,等)。这可以比拟定位精度1-3米的室内WiFi到达角(AOA)定位技术。

(图4.1 定位架构图)
网络服务器将对同一个数据帧的多个接收进行排序,将所有包含该帧数据时间戳的元数据进行分组,并从定位解算器请求一个定位计算。在一个给定的帧结构中,基本的定位解算函数将计算不同基站接收的时间差,然后通过这个时间差可以测算出终端设备到不同基站的距离。
一旦两个基站的TDOA已知,那么这个终端的位置就可以被放在一个双曲线中。通过多次时间差的计算,终端的位置信息就可以呈现在多个双曲线上,那么最终这个终端的位置就应该在这些双曲线的交点处。
定位的精确度与以下几个因素有关:
在这些约束条件下,精度很少依赖于接收到的信号电平。在多路径的情况下,由于系统带宽被限制为125 KHz,信号路径通常难以区分,只有平均信道延迟可以估计。在某些情况下,直接信号路径不存在,由于只能看到反射路径,所以将延迟偏移量引入到帧时间戳中。
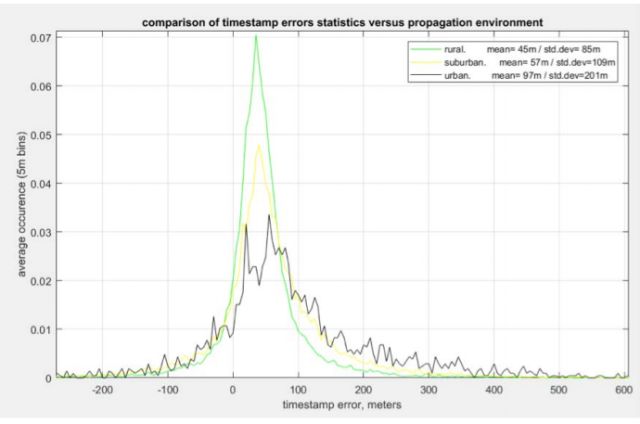
(图4.2 时间戳误差的统计)
总体来说,时间戳总是滞后的。要注意,时间戳误差可能是负的,但它们永远不会小于-1/带宽(绝不低于系统的基本分辨率)。我们可以利用偏差将时间戳误差分类,这个偏差就是平均误差,并在这个平均值附近传播。随着传播环境恶劣,偏差增大,传播变宽。
有多种方法可以减少时间戳误差:
• 在不同的频点下重复帧
• 增加基站的天线(通常是两个)
• 增加网关部署的密度,可增加可用样本的数量和视距测量的机会,从而提高TDOA的准确性
• 降低基站的延迟帧的时间戳
• 引入带外传播误差修正,以减轻多路径(模拟,预测,校准或指纹识别)
定位求解器的设计的目的是为了减少多路径。求解器将选择进行处理的时间戳的队列集,而忽略剩余的。然后求解器通过数据的求解,得到终端设备的位置。多路径传播从根本上限制了系统的精确度,但基站部署策略也起着重要的作用。
每一次由定位求解器计算的差异定义了一个双曲曲线。双曲线是开放的曲线,所以当终端设备相对于基站处于不合适的位置时,双曲线的交叉会导致误差放大。
GDOP可以捕获这个误差的放大系数,它只依赖于基站和终端设备的几何位置关系。对于二维坐标内的定位,我们引入水平DOP (HDOP,水平精度因子)。当HDOP是1时,代表没有误差放大;如果基站显示了一个时间戳60m(即200ns)的不确定性,那么最终定位的不确定性就是60m。当HDOP是2时,最终的不确定性就是120m。当基站部署密度很高,HDOP也可以低于1。
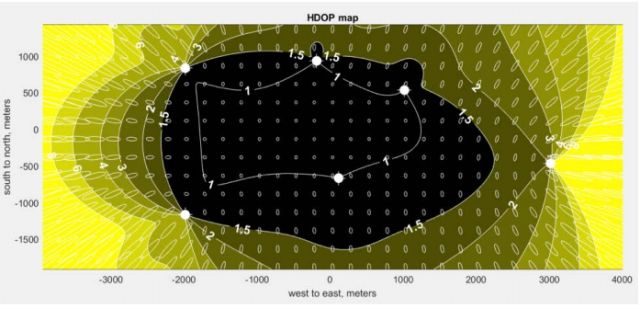
(图4.3 HDOP 地图)
中间区域,HDOP大于1并一直向两侧增大到大于8。在由网关组成的多边形之外区域,HDOP的增长非常快。而高HDOP大大降低了定位的准确性。
在常规空间中的白色不确定区域,既描述了位置误差的振幅,也描述了误差的方向(沿径向指向多边形的中心)。请注意地图的东侧,即使是在网关多边形区域中,HDOP也会带着较大的误差沿着南北轴达到2。这是由于沿该轴的网关密度较低。
这里需要提到的是,并不是基站的位置越近,定位效果就越好;最重要的是基站位置布局策略。与矩形的中间相比,在四个网关构成的正方形中间位置的定位精度会更好。
在覆盖多边形之外的糟糕表现应该是部署策略的问题。所以对于小规模或试点定位部署,强烈建议引入HDOP并进行网关位置选择优化。
在城市中低矮的屋顶或广告牌上安装的基站也会受到较少卫星的“城市峡谷”效应的影响。当GPS接收质量良好时,时基误差大约为25ns (<10m)。GPS并不是主要的误差来源,因为部署精度无法达到10m。但是在部署非常密集的LoRaWAN网络中,提高网关时钟精度可以进一步提高定位的精确度。
回到LoRaWAN 定位,由于预滤波的位置估计值是稀疏且有噪声的,所以滤波对定位性能有很大的影响。如果滤波器可以利用一个特定的终端设备的速度配置文件,就可以提高定位的精度。这些配置信息来源于终端本身(固定、移动等等),并且是特定应用指向的。
另外一个特定应用的用途是匹配滤波。例如,如果终端设备在仓库之间移动,过滤器首先将终端设备分为静止的或移动的。如果它是静止的,则可以认定它位于某个仓库中。如果它在移动,则它位于某条路径上。
对于低功耗的优化,LoRaWAN占空比在某些地区会有限制,这样一来终端设备每天只能传输有限数量的帧数。这种限制是LoRaWAN通信限制的一个方面,并不是特定于定位场景。实际中固定的设备比运动更容易定位,因为因为一些帧的数据可以更容易利用来过滤位置估计。
在2017年的全球移动大会上,Actility和Cisco在ZAL港安装了6个IR829/IXM LoRaWAN网关,实现了ZAL港的专用LoRaWAN网络覆盖。ZAL管理系统可为港口内的公司提供安全、运维以及日常服务。
网络覆盖了港口内0.43平方公里的面积,6个网关间隔400~600米以确保良好的网络覆盖性。三层楼的金属建筑区域内并没有专门可以放置天线的高点,所以天线被直接安装在屋顶(次优配置)。
Abeeway定位终端安装在管理车辆上。定位终端在LoRaWAN TDOA模式下工作是最节能的定位方式。如果对于功耗方面考虑较少,使用LoRaWAN 上行来辅助GPS上报定位数据可用于需要更高精度的场景(10m内的精度)。
与典型的AGPS/GSM定位终端相比,LoRaWAN定位终端节省了50%以上的电能。并且由于是电池供电且无需其他电源,终端的安装十分简便,只需用胶粘、螺丝固定或者其他简单手段固定在车上。同时使用APP来实时监控ZAL港的在线车辆运行情况。
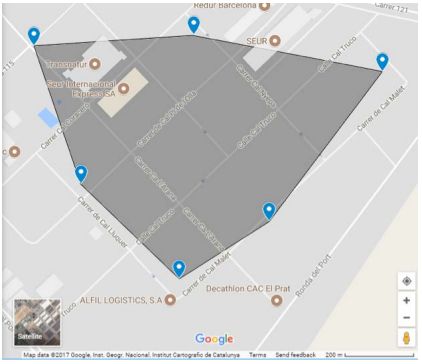
(图5.1 巴塞罗那ZAL港基站位置示意图)
(图5.2 ZAL港口TDOA定位精度:固定车辆)
在这个案例中,定位精度并不是那么重要,因为定位信息在这里主要用于当车辆进出指定区域进行触发警报。图5-3显示了移动车辆的定位精度。
(图5.3 ZAL港口TDOA定位精度:移动车辆)
网络覆盖区域面积大概为1.6平方公里,四个基站间隔为900米至1300米,构成一个五角形区域,部署在布伦的第五个基站会应用在未来的测试中。该区域包括商业、市政和住宅,以及更开放的用地,如塞纳河、公园和体育场。天线安装在60m到126m的高度。
高点部署(如图5-4所示)可提供长距离覆盖,但地面覆盖效果有时也会受到影响。由于多山的地形,如要保证最佳的定位能力还需要增加基站的部署(每个定位终端的数据至少要被三个基站接收)。
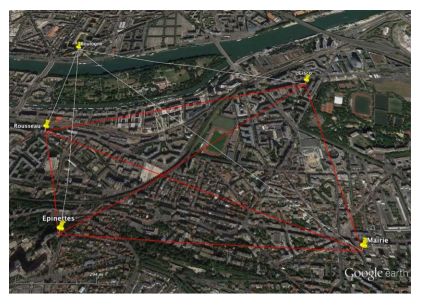
(图5.4 伊西莱穆利诺/布伦网关部署示意图)
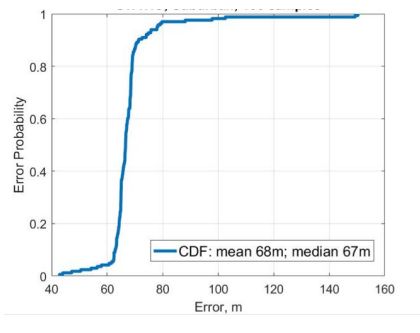
在由网关相互连接构成的区域中(HDOP较好),定位精度可达到75-115m(近似标准偏差为25m)。在区域外围,定位精度是400m(HDOP较差)。这些结果与巴塞罗那ZAL港口的测试发现一致。图5-5提供了一个典型的定位图。其他的网关部署策略、固定和移动终端的测试还在进行中。
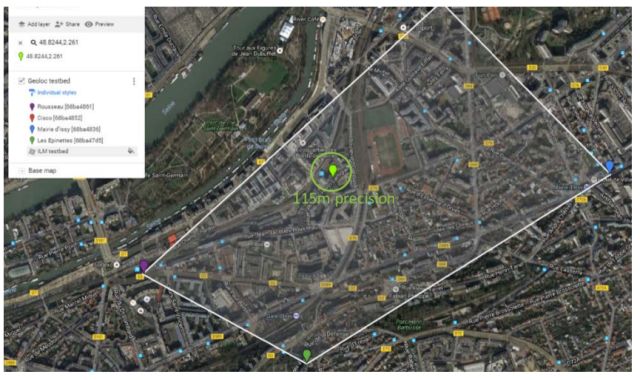
(图5.5 巴黎定位案例示意图)
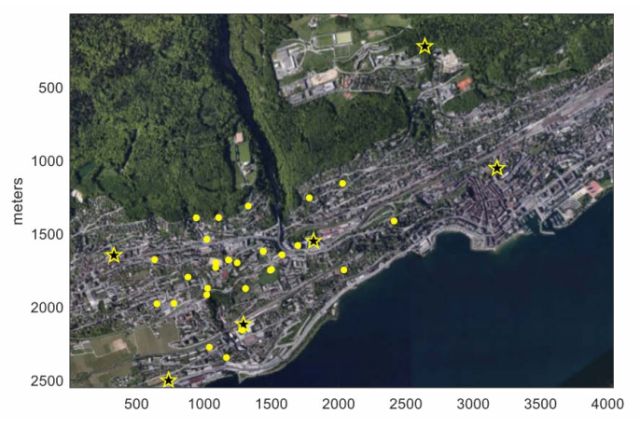
(图5.6 纳沙泰尔定位例子示意图)
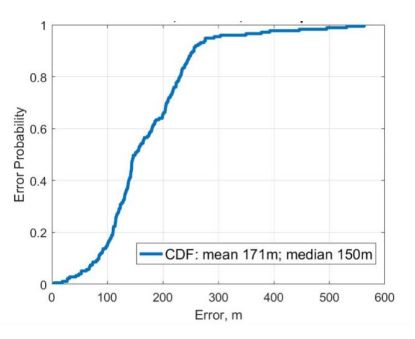
在不同的数据速率下进行了多组测试:SF7, SF10 和 SF12。它们的性能是完全相同的,说明多路径和GDOP才是影响性能的主要因素。GDOP越差,定位性能相应变差:8帧时,90%的定位精度仅为205米。
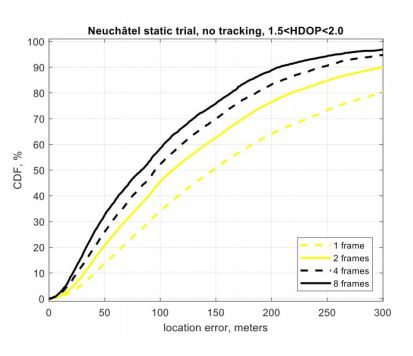
(图5.7 纳沙泰尔定位性能图)
去年9月,第一个LoRaWAN追踪器被植入了一头犀牛的犀牛角,并让该公园的安全人员自己操作来定位、监控犀牛。
犀牛保护区是一个占地50平方公里的围栏区域。已经部署了四个支持定位的Kerlink网关来实现该区域的LoRaWAN覆盖。大门之间的距离在4公里到10公里之间。定位精度超过50m,在某些情况下超过20m。
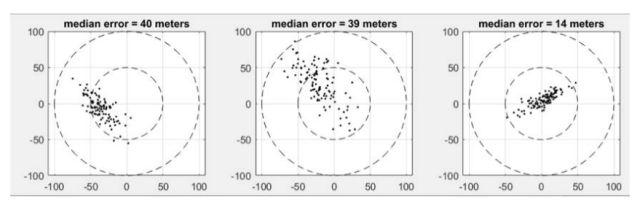
(图5.8 姆科马齐定位试点示意图(四帧))
公园管理部门正在使用的其他智能应用还包括安装在车辆上的太阳能追踪器,用于追踪高危区域内人员和游客的行踪。图5-9显示了单帧定位结果,精度高于50米,但是比四帧的情况变化更多。
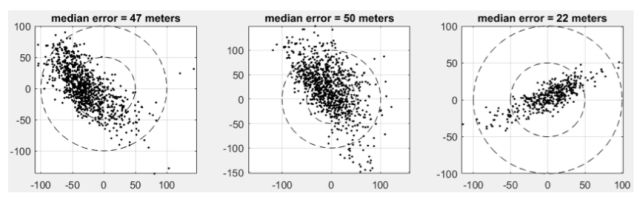
(图5.9 姆科马齐定位试点示意图(单帧))
Ubysol解决方案支持“大巴黎”区域总体规划,目的是将巴黎市区(巴黎市区和周边的130个郊区、社区)改造成21世纪的城市。据估计,该项目将产生超过4300万吨的建筑垃圾。每辆卡车配备一个Siconia™多传感器终端设备。终端设备的数据传输由运动传感器触发,并使用陀螺仪来检测装卸货。
为了给LoRaWAN定位做基准测试,一些卡车同时也安装了GPS传感器。GPS和LoRaWAN定位的路径进行了比较,如图5-10,两个路径吻合度较好。
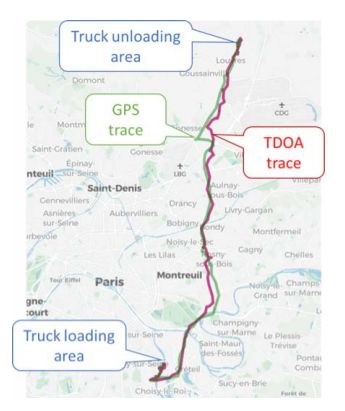
(图5.10 GPS、LoRaWAN TDOA定位路径对比)
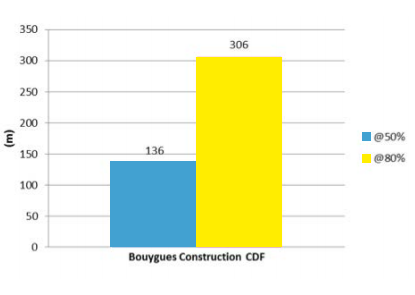
(图5.11 Ubysol的解决方案精度统计)
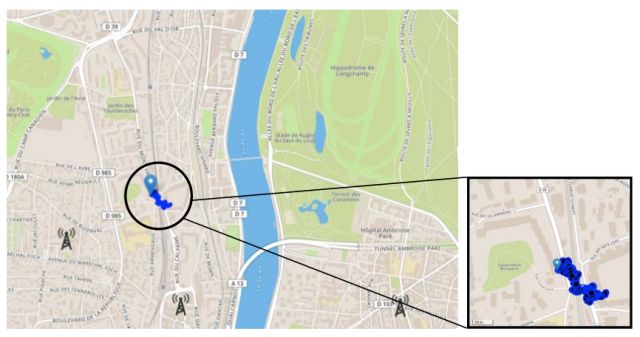
(图5.12 巴黎市中心的卡车定位示意图)
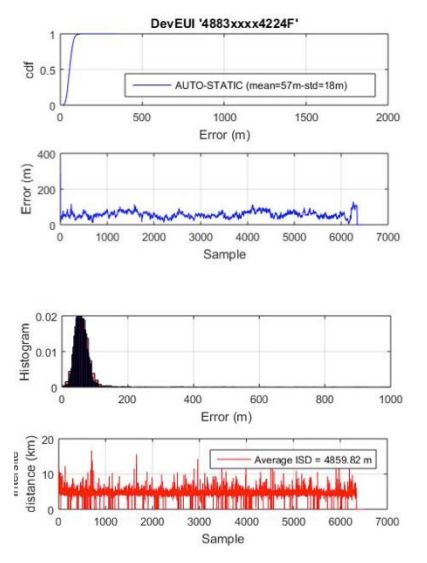
(图5.13 定位性能(CDF, ISD),巴黎市区)
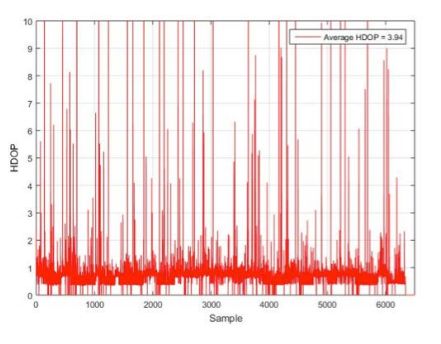
(图5.14 瞬时HDOP影响,巴黎市中心)
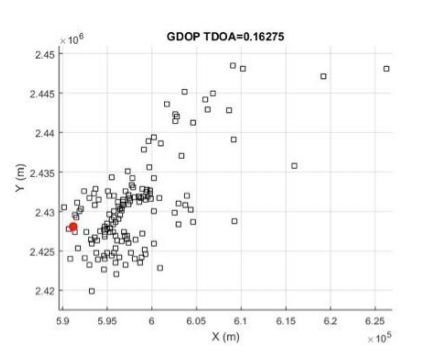
(图5.15 在网关部署情况下一个固定终端(红色)
的GDOP估计)
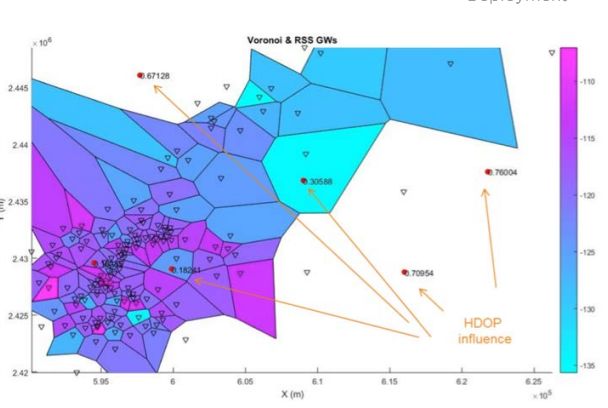
(图5.16 HDOP影响 vs. 终端与基站距离)
Kerlink公司在世界范围内的各种环境和条件(农村、半城市、城市)建立了若干测试平台,以评估和优化定位求解器的性能,特别是计算精度和定位精度。部署在托里涅富伊拉尔的测试平台将会一直工作下去,四个基站安装在城市中、多个定位终端放置在计划好的固定位置。当定位求解器收到一个近实时的消息时它开始计算该位置信息,然后将结果返回到指示板进行显示。
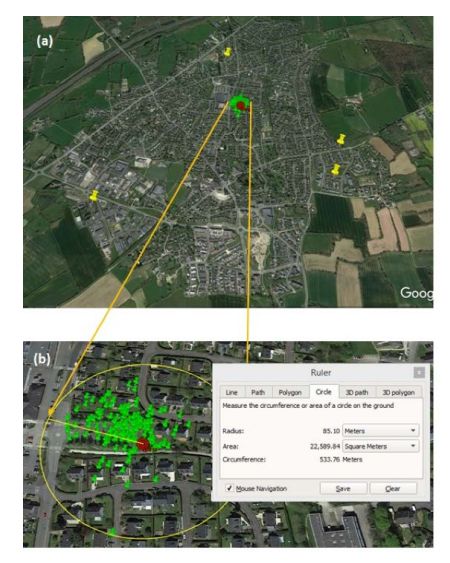
图5.17 (a)托里涅富伊拉尔LoRaWAN定位测试平台
(b)静止终端的估测位置
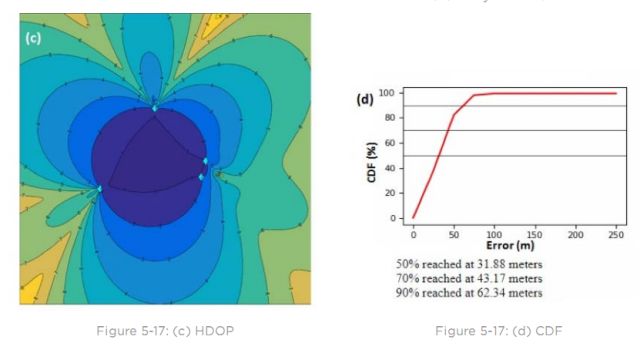
图5.17 (c)HDOP (d)CDF
• LoRaWAN TDOA 定位能够提供20到200米的定位精度。
• LoRaWAN 定位的一个好处是利用长期使用、电池供电的A类终端设备实现,因此实现了零额外的BOM成本的增加。
• 减少多路径误差和良好的网关部署规划能将定位精度提升到20米。
• LoRaWAN TDOA定位特别适用于如下场景:
•区域围栏。固定资产是否被移动?(建筑工地、公用场地、机场、校园等场所的防盗)
•追踪移动缓慢的资产,不要求频繁的位置更新(人、宠物、牲畜、车辆等),特别适用于智能农业和智慧城市某些案例。
LoRaWAN TDOA定位可能并不适合如下场景:
• 实时、移动的资产跟踪。越高的定位频率正意味着越多的电量消耗,C类终端,等。
•高动态资产定位。
• 高精度定位(亚米级,至少使用现在的基站时钟无法达到)
• LoRaWAN协议用在需要GPS功能传输的用例。
作者:LoRa Alliance™ Strategy Committee
您的留言或需求: